



QGroundControl
Опис програми QGroundControl
QGroundControl забезпечує повний контроль та налаштування польотів для автомобілів ArduPilot або PX4 Pro. Мета QGroundControl - це покращення простоти використання для нових користувачів, а також підтримка високотехнологічних функцій для досвідчених користувачів.
Функції QGroundControl:
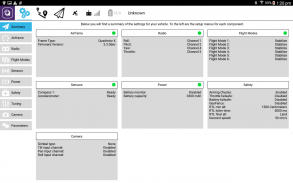
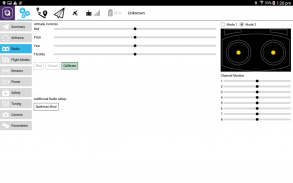
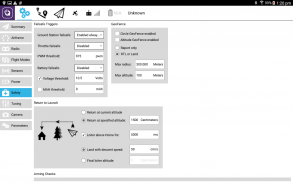
- Повна підтримка конфігурації для машин, що працюють із PX4 Pro та ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub) прошивки
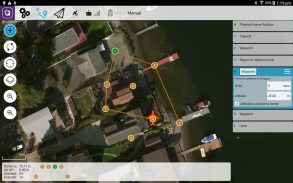
- Планування місії для автономного польоту
- дисплей на карті польоту із зазначенням позиції автомобіля, траси польоту, точок маршруту та приладів транспортних засобів
- Потокове відео з накладанням дисплея на приладі
- Підтримка польотів для будь-якого MAVLink-сумісного автомобіля
QGroundControl також доступний для Windows, MacOS, Linux та iOS.
Випуск приміток
Офіційний сайт QGroundControl
Документація
Підтримка
QGroundControl – Версія 4.1.1
(29-01-2021)QGroundControl - інформація про APK
Версія APK: 4.1.1ID пакета: org.mavlink.qgroundcontrolОстання версія QGroundControl
Інші версії







 3.55
3.55
 3.17
3.17



Додатки в цій категорії


Вам також може сподобатися...







